






La OMS (acrónimo) en su informe del 2015, menciona que los accidentes de tráfico son una de las causas de muerte más significativa e importante en el mundo [1] (Fig. 1).
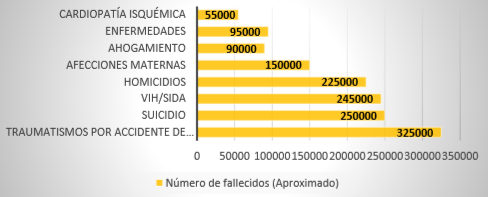
Figura 1. Causas principales de muerte. Fuente: OMS [1].
Aproximadamente la mitad del total de muertes que se producen en las carreteras del mundo se da entre los usuarios considerados como menos protegidos de las vías de tránsito [2]: motociclistas (23%), peatones (22%) y ciclistas (4%) (Fig. 2).
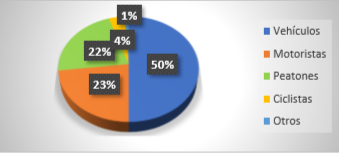
Figura 2. Accidentes mortales. Fuente: OMS [1].
Los datos estadísticos expuestos revelan que los conductores de motocicletas tienen enormes posibilidades de ser víctimas de accidentes de tráfico. Sabiendo de antemano que el factor humano es el más relevante en siniestralidad se ve la necesidad de desarrollar un proyecto que ofrezca la posibilidad de reducir las víctimas de accidentes viales en los que se encuentre involucrada una motocicleta mediante la formación y el cambio de conducta del motorista. De ahí la relevancia de familiarizarse con los posibles riesgos que se generan en los distintos entornos por los cuales se circula diariamente y la importancia de interiorizar hábitos y actitudes positivas de convivencia en las vías; concienciando sobre los riesgos a los que se expone y la manera de actuar para evitarlas.
1.OBJETIVOS
Proponer una herramienta útil para la formación y concienciación de conductores de motocicletas que permita familiarizarse con las zonas de riesgos a las que se exponen en el período de conducción, disminuyendo así el riesgo de accidentes generado por los puntos ciegos de los vehículos.
2.CONDUCCIÓN SEGURA DE MOTOCICLETAS Y CICLOMOTORES.
Para los ciclomotores es indispensable tener en cuenta la interacción con los demás vehículos que circulan. Se debe evitar comportamientos de riesgo como: maniobras en zig-zag, evitar exponerse a los puntos ciegos de los distintos tipos de vehículos, adelantar por el lado derecho, etc. Estos comportamientos son causantes de caídas y colisiones de motoristas especialmente en vías urbanas.
Puntos ciegos
Son distintas áreas alrededor de un vehículo que no pueden ser controladas ni observadas directamente por el conductor, para lograr reducir el tamaño de estas áreas se hace uso de espejos retrovisores. La estructura de la carrocería, en si genera varios obstáculos inevitables al momento de conducir y se los denomina puntos ciegos ya que obstruyen la clara visualización del entorno al que el conductor se enfrenta.
En la Figura 3 se observa señalado con color rojo los “puntos ciegos” o también llamados “ángulos muertos” en los tres tipos de vehículos más comunes en vías urbanas, son zonas en las que es imposible de controlar, ni con ayuda de espejos retrovisores.

Figura 3. Puntos ciegos en los vehículos. Fuente: ISSL [3].
Los peligros más frecuentes ocasionados son:
- Cambio de carril peligroso colisionando con otro vehículo.
- Derribar o atropellar a un motociclista o ciclista.
- Choque al girar, por motorista o vehículo invadiendo área de un vehículo de grandes dimensiones.
- Golpear o derribar un motorista, al abrir una puerta por el lado indebido.
- Provocar un accidente a terceros, debido a una maniobra peligrosa.
3.SIMULADORES
Actualmente se utilizan simuladores de conducción para la formación y capacitación de conductores. Un inventario realizado sobre simuladores existentes en Europa utilizados para formación de conductores bajo el Marco de la Red de Excelencia HUMANIST [7], los clasificó en las siguientes categorías:
Plataforma fija o móvil sin cabina de hasta 3 grados de libertad
Usado frecuentemente en autoescuelas es capaz de almacenar los resultados una vez terminado el ensayo para una posterior evaluación y análisis de las distintas experiencias de los alumnos. Se controlan mediante un portátil, permiten la visualización de 180º mediante pantallas. Los que cuentan con plataforma móvil, son capaces de reproducir los movimientos generados por el avance del vehículo. (Fig. 4).

Figura 4. Simulador fijo 3 grados de libertad. Fuente: http://simulador-kaelh.blogspot.com
Simulador con cabina y plataforma de 6 grados de libertad.
Utilizados en investigaciones o experimentos de seguridad vial y para pruebas de sistemas de transporte inteligente. Crea escenarios con efectos y características cercanos a la realidad y cuenta con una cabina idéntica al interior de un vehículo con sistemas de proyección, sistema de movimiento y sonido (Fig. 5).

Figura 5. Simulador con cabina y plataforma de 6 grados de libertad. Fuente: http://simfor.es/wp/?portfolio=automovil
Simulador de vehículo pesado (camiones y autobuses).
Utilizado para formación de conductores profesionales, están diseñados para hacer notoria la magnitud del vehículo en todas sus dimensiones y también su peso y sonidos que genera al desplazarse o cambiar de velocidad. Además, cuentan con sistema de visión para simular los retrovisores para maniobras de marcha atrás o aparcamiento, sistemas de movimiento para lograr tener una perspectiva del movimiento. (Fig. 6).

Figura 6. Simulador vehículo pesado. Fuente: https://www.laopiniondemurcia.es
Las principales ventajas de un simulador son:
Costes:
- Menor inversión y mantenimiento que un vehículo.
- Menor consumo eléctrico respecto al combustible.
- Durabilidad y disponibilidad continúa.
Seguridad:
- Evita accidentes viales frente al tráfico real.
- Disminución del riesgo de accidente en entornos controlados.
Variedad de entorno:
- Programación de prácticas que aumenten la dificultad de los entornos y condiciones adversas (meteorológicas o mecánicas).
Sostenibilidad:
- Disminución del tráfico en la ciudad, reducción de emisiones de contaminantes al medio ambiente.
Educación vial con Unity3D
Unity 2D o 3D es un motor de videojuego multiplataforma desarrollado por Unity Technologies que permite crear escenarios 3D e interactuar mediante gadgets en mundos virtuales. Con ayuda del software Unity 3D, se ha creado una simulación con distintos obstáculos y características de una ciudad, con la finalidad de realizar prácticas formativas en un entorno seguro para la familiarización y adquisición de destrezas de conducción de motociclistas, haciendo énfasis en los puntos ciegos de los vehículos con los que interactúan en el tráfico cotidiano.
Inicialmente se crea la simulación virtual de una ciudad con un entorno de circulación vehicular, se incluyen distintos tipos de vehículos que normalmente circulan por el entorno urbano, como: automóviles, furgonetas y autobuses. En este entorno es donde se ha registrado la mayor incidencia de accidentes de motocicletas.
Entorno
El planteamiento realizado está dirigido a simular desplazamientos regulares que hacen los motociclistas profesionales (repartidores de paquetería o comida rápida) en ciudades en los que existe cierta congestión de tráfico. En estas circunstancias el conductor aprovecha las pequeñas dimensiones que tiene su motocicleta para sortear los distintos obstáculos a riesgo de invadir los puntos ciegos. (Fig. 7).

Figura 7. Simulación de la ciudad y tráfico en Unity 3D.
Vehículos
Como se ha mencionado anteriormente cada vehículo posee distintos puntos ciegos debido a sus dimensiones y diseño. Para lograr evitar accidentes por estos motivos es indispensable que el motociclista se encuentre familiarizado con las zonas en las que se expone a riesgo continuo durante la circulación. En la Figura 8, se aprecian los tipos de vehículos que normalmente interaccionan en el tránsito de zonas urbanas, dependiendo de su tamaño o diseño varía la cantidad y área de los puntos ciegos.

Figura 8. Simulación de tipos de vehículos.
La Figura 9 muestra un ciclomotor (scooter), se ha simulado este tipo debido a su gran afluencia y uso no solo personal, sino que además su uso se ha multiplicado considerablemente como herramienta de trabajo para repartos a domicilio.

Figura 9. Simulación Scooter.
Maniobras
Una de las ventajas del simulador es la posibilidad de analizar la conducción y las distintas maniobras que el conductor ha realizado, esto para concientizar y dar a conocer las veces que se ha puesto en riesgo por invadir zonas peligrosas o cometer una imprudencia. En la Figura 10, se puede apreciar como el ciclomotor realiza un adelantamiento peligroso y colocarse reiteradas veces en un punto ciego del otro vehículo. En este caso en concreto ha invadido los puntos ciegos: trasero y lateral izquierdo del vehículo (furgoneta).

Figura 10. Simulación de adelantamiento indebido.
A continuación, se muestra un adelantamiento correcto en el cual el motociclista toma una distancia prudente del vehículo, la cual le permite hacer notar su presencia y le da la posibilidad de realizar maniobras defensivas si fuere necesario. (Fig. 11).
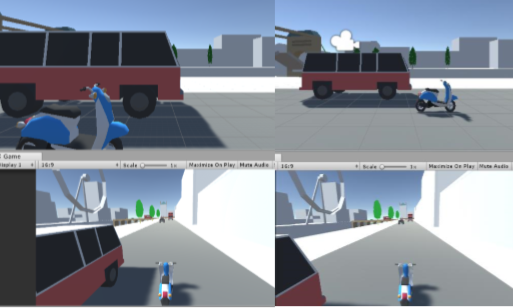
Figura 11. Simulación adelantamiento correcto.
El trabajo muestra la prudencia al conducir por parte del motociclista al momento de circular (conducción defensiva). La Figura 12 muestra la ubicación adecuada de un motociclista al interactuar con un vehículo de grandes dimensiones (autobús), esta distancia según la DGT debe ser la suficiente para ser recorrida en al menos 3 segundos [4], lo que permite tener espacio y tiempo suficiente para frenar o maniobrar con seguridad ante cualquier imprevisto.
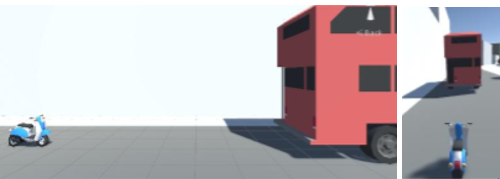
Figura 12. Simulación distancia de seguridad correcta.
En la Figura 13 se observa una deficiente distancia de seguridad del motociclista que se encuentra en el área de punto ciego del autobús. Además, debido a las dimensiones de este le es imposible tener una visión periférica que le permita reaccionar frente a un imprevisto. En el caso que ambos estuvieran circulando a una velocidad permitida de 50 km/h en zona urbana una ligera frenada tendría como consecuencia el choque del motociclista contra la parte trasera del autobús.

Figura 13. Simulación distancia de seguridad incorrecta.
La Figura 14 muestra un adelantamiento correcto donde el motociclista evita entrar en zonas ciegas del autobús haciendo notar su presencia en todo momento y dejando espacio suficiente si necesitara realizar una maniobra defensiva.

Figura 14. Simulación de adelantamiento correcto.
Si se circula delante de un autobús o al finalizar un adelantamiento el motociclista debe situarse de manera que el conductor se percate de su presencia y a una distancia prudente como se puede ver en la Figura 15, esto con la finalidad que le dé seguridad en caso de tener que hacer maniobras o movimientos imprevistos y bruscos.

Figura 15. Simulación de correcta circulación.
La Figura 16, permite apreciar una escena que se vive en el transito diariamente y es causante de un gran porcentaje de la siniestralidad en el casco urbano en el cual está implicado un motociclista. Debido a su tamaño y fácil maniobrabilidad de las motocicletas, éstas se encuentran constantemente en peligro por imprudencia de sus maniobras ya que invaden zonas peligrosas (puntos ciegos), circulan por espacios que les restringen su movilidad, etc.
En este caso en particular el motociclista invade puntos ciegos tanto del autobús como del automóvil y a esto se suma el poco espacio existente entre los dos que es por donde el motociclista pretende rebasar. Una ligera maniobra improvista de cualquiera de los dos vehículos ya sea por culpa de un tercero o debido a la presencia del motociclista sería desencadenante de un accidente con consecuencias graves para el motociclista debido a su inferioridad en tamaño y en medidas de seguridad.
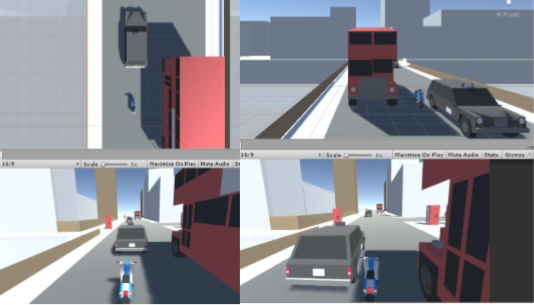
Figura 16. Simulación adelantamiento peligroso entre vehículos
Se observa en la Figura 17 la manera segura de realizar un adelantamiento de un motociclista entre dos vehículos, donde lo indispensable es la distancia de seguridad entre los implicados que permita maniobrar y ser visible en todo momento evitando invadir los puntos ciegos de los vehículos.

Figura 17. Simulación de adelantamiento correcto entre vehículos.
Otro accidente típico en zonas urbanas es el aplastamiento o caída por golpe, en la Figura 18 se observa que la colocación del motociclista para realizar un giro no es la correcta debido a que invade la zona de acción del autobús y también sus puntos ciegos. En el caso de invasión por el lado interno (según el sentido de giro) debido a las dimensiones del autobús le es casi imposible percatarse de la presencia del motociclista lo cual como consecuencia tiene el aplastamiento, por otra parte, si la invasión fuese por el lado externo (según sentido de giro) la consecuencia sería el derribo por golpe, en ambos casos las consecuencias para el motociclista son graves.
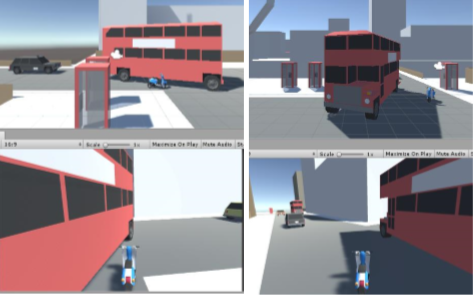
Figura 18. Simulación de maniobra peligrosa.
El uso del simulador aumenta la percepción del usuario ante el riesgo de invadir los denominados puntos ciegos, mediante la simulación de escenarios y situaciones comunes de tráfico en zonas urbanas se logra mejorar la capacidad de los motociclistas para predecir y actuar ante los distintos peligros a los que se enfrentan diariamente sean o no causados por ellos.
Se debe inculcar un tipo de conducción defensiva por parte del motociclista si se es conductor poco habitual y más aún si usa el ciclomotor como herramienta de trabajo debido a que cuanto más tiempo se encuentre en circulación existe más riesgo de sufrir un accidente.
Al usar un simulador se disminuye la congestión vehicular, además aporta más seguridad para la población en general ya que no se los expone a la presencia de una persona inexperta al mando de un vehículo que puede llegar a ser mortal en un accidente.
[1] OMS, «Informe sobre la situación mundial de la siniestralidad vial», Ginebra, 2015.
[2] RACC, «Encuesta sobre accidentalidad de los motociclistas (Honda)», Madrid, 2013.
[3] M. ISSL, «INSTITUTO DE SEGURIDAD Y SALUD LABORAL», 21 05 2018. [En línea]. Available: www.carm.es.
[4] D. G. d. T. d. España, «DGT», [En línea]. Available: http://www.dgt.es/es/seguridad-vial/. [Último acceso: 20 junio 2018].
[5] «Escuela de conductores», [En línea]. Available: https://www.escueladeconductores.es/ver/488/que-necesitas-para-conducir-unamoto-de-gran-cilindrada.html. [Último acceso: 2018 Julio 20].
[6] F. Brolese, «Geduvia», [En línea]. Available: https://geduvial.blogspot.com/2012/08/puntos-ciegos-del-retrovisor.html. [Último acceso: 20 07 2018].
[7] J. M. PARDILLO, Inventory of existing simulation and multimedia tools for driver training and education., Lyon: Humanist deliverable G1 GUPM-041018T1-DA (2), 2004.
[8] U. Technologies, «Unity», Unity Technologies, 2002. [En línea]. Available: https://unity3d.com/es. [Último acceso: 30 Julio 2018].
Papers relacionados











