






La tecnología ha avanzado hasta tal punto que permite interactuar con un mundo virtual creado por ordenador. Se puede definir la realidad virtual como la representación de objetos del mundo real a través de medios electrónicos simulando las percepciones sensoriales de forma que el usuario las tome como reales.
La realidad virtual inmersiva es aquella que se da en un ambiente tridimensional creado por un ordenador, siendo una interfaz humano-máquina avanzada que permite experimentar de manera multisensorial, una simulación computarizada de manera interactiva y en tiempo real en la cual los usuarios pueden interactuar a través de cascos, guantes y otros accesorios para el cuerpo. Consta de equipamientos, instalaciones, software, hardware y aplicaciones diseñadas para tal fin.
Si bien la tecnología de realidad virtual existe hace más de cincuenta años, hace sólo cinco bajó sus costos y se hizo más accesible. De esta forma, ya se ve un alcance masivo de esta tecnología, sobre todo en videojuegos. Sin embargo, existen provechosas ventajas en el área laboral que aún no han sido exploradas, en especial en cursos de capacitación y entrega de conocimiento efectivo en el área de seguridad
La realidad virtual se ha convertido en una herramienta útil en el campo de la seguridad, actualmente se comienza a utilizar como herramienta para la formación de los trabajadores a partir del aprendizaje inmersivo. Queda abierta así la posibilidad de entrar en escenarios virtuales con la máxima sensación de realidad junto con el desarrollo de accesorios que apelan a los sentidos como guantes y gafas generándose una sensación de realismo total. La plataforma, con las limitaciones espaciales, hace que el usuario se pueda desplazar libremente por un escenario virtual ofreciendo más realismo.
Este tipo de aprendizaje, según algunos estudios realizados, tiene un porcentaje de retención de conocimiento en mensajes clave del 90%, frente a los métodos de formación tradicionales que proporcionan un retorno de entre el 10 y el 20%.
La sensación de realidad, hace que esta tecnología sea extremadamente útil para la formación en seguridad y salud, dado que permite practicar situaciones de riesgo e incluso accidentes de manera controlada, las veces que sea necesario hasta conseguir la plena formación de los operarios: trabajos en andamios, trabajos agrícolas, carretillas elevadoras, son algunos de los trabajos que en nuestro grupo ya se han comenzado a desarrollar.
Esto hace que se puedan proporcionar:
- Información, formación y capacitación de operarios.
- Medición de curvas de aprendizaje.
- Entrenamiento en zonas con riesgo de accidente laboral.
- Corrección de errores tempranos en la fase de aprendizaje.
- Incrementar la seguridad del operario en trabajos con riesgo de accidente laboral.
- Investigación de accidentes.
El objetivo principal es la aplicación de la tecnología de Realidad Virtual Inmersiva en el desarrollo de herramientas para la investigación y formación en prevención de riesgos laborales, concretamente en el desarrollo de un simulador de conducción de un tractor agrícola.
El atrapamiento por vuelco de tractor sin cabina es sin duda el riesgo laboral más importante en el sector agrario por la gravedad de las lesiones que ocasiona, en su mayoría accidentes mortales.
La legislación ya establece la obligatoriedad de que todos los equipos de trabajo cuenten con una estructura de protección. En algunos casos, los tractores sí incorporan el arco de seguridad antivuelco, pero éste se encuentra recogido. Se debe accionar de forma manual y voluntariamente, lo que genera multitud de situaciones en las que no se utiliza convenientemente, quedando de este modo desprotegido frente al vuelco. En estos casos, aunque se haya puesto a disposición de los trabajadores tractores que cumplen con la normativa del RD 1215/1997, parece necesario que se deben adoptar nuevas medidas que reduzcan los riesgos.
En la pasada edición del ORP celebrada en Chile se presentó, cómo solución a este problema, el diseño de un dispositivo de seguridad autónomo de accionamiento automático del arco antivuelco. En el simulador desarrollado se ha incorporado este nuevo dispositivo de seguridad para el estudio de su funcionamiento.
El modelo de tractor elegido para la simulación es el tractor agrícola CASE IH-2140, versión sin cabina. Se trata de un tractor de pequeñas dimensiones diseñado específicamente para cubrir los requerimientos de los trabajos en viñedos y frutales.

Imagen 1. Tractor agrícola CASE IH
Diseño del tractor
Entre los muchos programas de diseño asistido por ordenador se elige el software Solidworks2014, solución de diseño tridimensional completa, que integra un gran número de funciones avanzadas para facilitar el modelado de piezas, crear grandes ensamblajes, generar planos y otras funcionalidades que le permiten validar y gestionar proyectos de forma rápida, precisa y fiable.
Haciendo uso de esta herramienta se obtiene un modelo 3D del tractor con un aspecto visual y comportamiento físico realista. Además se ha modelado el arco de seguridad abatible con el dispositivo de seguridad automático.

Imagen 2. Modelo 3D del tractor CASE IH.
Diseño de la escena virtual
Para la creación de la escena virtual se utiliza UNITY 5, software de desarrollo de videojuegos y experiencias interactivas 2D/3D.
Se ha utilizado un terreno agrícola abrupto en que se encuentran diferentes pendientes y obstáculos que sirven para ensayar las situaciones de riesgo de vuelco habituales a los que se enfrentan los tractoristas.
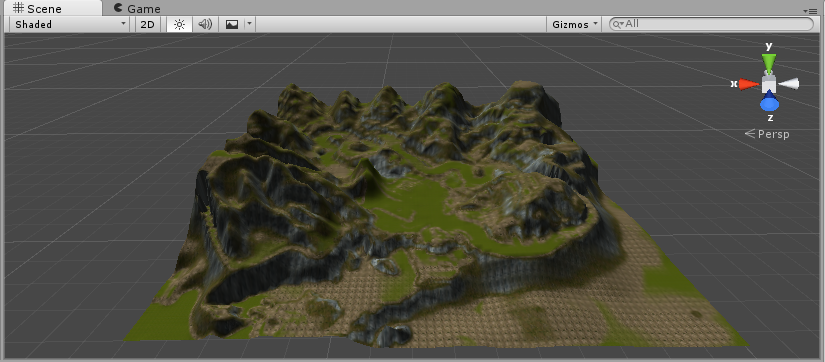
Imagen 3. Creación del terreno agrícola virtual.
Además en UNITY 5 se programa el comportamiento físico del tractor y se configura la escena virtual y los periféricos de realidad virtual que forman parte del simulador.
Plataforma de simulación de conducción
El simulador incorpora una plataforma de movimiento de 3 grados de libertad que transmite la sensación de aceleración, inclinación y vuelco. Es capaz de alcanzar +- 12 grados de inclinación, suficiente para transmitir la sensación de vuelco de manera segura.
Dicha plataforma está compuesta por una base sobre la cual se encuentran 3 motores y una plataforma superior sobre la que acopla el sistema de conducción (asiento, volante, pedales y mandos).
Cabe destacar que se ha incorporado un cinturón de seguridad en la plataforma para su uso obligatorio. Con él conseguimos, además de prevenir el riesgo de caída de la plataforma, fomentar el uso del cinturón de seguridad en los tractores, ya que actualmente no es obligatorio pero sin el cual los dispositivos de seguridad antivuelco pierden eficacia.

Imagen 4. Plataforma de simulación de conducción.
Gafas de realidad virtual
Las gafas de realidad virtual, Oculus Rift, permiten al conductor experimentar la simulación de manera completamente inmersiva. Utiliza una tecnología de seguimiento personalizado que ofrece un seguimiento de baja latencia de la cabeza a 360°. Realiza un seguimiento en tiempo real del movimiento de la cabeza creando una experiencia natural e intuitiva. El campo de visión es de más de 90 grados horizontales (110 grados en diagonal).

Imagen 5. Gafas de realidad virtual Oculus Rift.
Otros periféricos
El simulador se conecta a un retroproyector situado frente a la plataforma. Ofrece la posibilidad de visualizar lo que está viendo el conductor al resto de espectadores.
También se dispone de un equipo de sonido surround para conseguir una experiencia virtual envolvente con una percepción más real.
Durante la simulación el conductor podrá experimentar la conducción libre del tractor por un terreno agrícola.
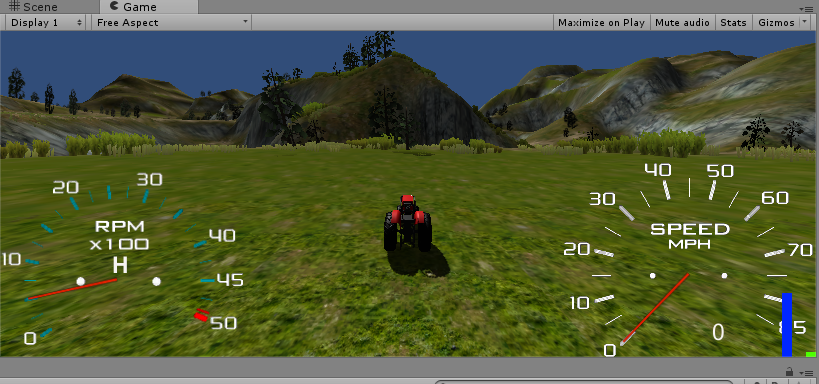
Imagen 6. Escena virtual.
Podrá decidir en cualquier momento interactuar con el dispositivo de seguridad, pudiendo subir manualmente el arco de seguridad pulsando un botón si cree que hay riesgo de vuelco. O bajarlo para evitar dañar los arboles frutícolas y salvar obstáculos. De esta manera obtenemos información sobre la percepción de peligro del conductor y su nivel de comportamiento seguro.
Si durante su recorrido se alcanza el ángulo de inclinación crítico se desplegara automáticamente el arco de seguridad simulando el funcionamiento real del dispositivo de seguridad automático.

Imagen 7. Conducción en el simulador.

Imagen 8. Vuelco en el simulador.
Este proyecto muestra la aplicación de la realidad virtual inmersiva como herramienta que sirve tanto para la formación y concienciación en prevención de riesgos laborales como para la simulación del funcionamiento de nuevos dispositivos de seguridad.
Muchas de las situaciones en las que el trabajador se encontrará no pueden ser practicadas en un entorno real por conllevar un riesgo para el trabajador. El uso de simuladores permite al trabajador entrenarse repetidamente en condiciones que podrían ser peligrosas adquiriendo un entrenamiento adecuado mediante la repetición, de forma que cuando el trabajador se encuentre con esa situación en la vida real sepa reaccionar adecuadamente ya que la ha practicado multitud de veces en el simulador.
Concretamente este simulador permite formar a los conductores de tractores agrícolas sobre la conducción segura y el uso adecuado de los dispositivos de seguridad (cinturón, arco de seguridad, etc.), concienciándolos sobre el riesgo de accidente por vuelco y reforzando las conductas seguras.
Otra aplicación del simulador es como herramienta para la investigación de accidentes. Permite recrear las condiciones del terreno y los parámetros del tractor para ayudar a determinar las causas del accidente.
Papers relacionados










